|
笔记本电脑保护罩贴标引导贴合项目背景: 国际知名消费电子生产商,需要对一款新能源电脑保护罩进行泡棉贴合定位并检测贴合位置,德斯戈采用大视野多相机的方案,使用自动标定技术,有效消除贴合误差,同时通过多相机快移动的拍照方式解决了困扰客户的CT问题。 客户需求:
检测需求: 1、贴标引导贴合 2、贴标后尺寸测量 解决方案:
检测过程:
外壳
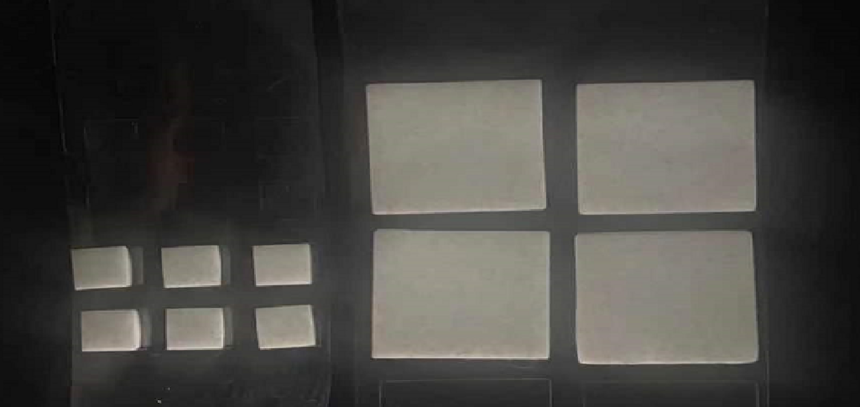
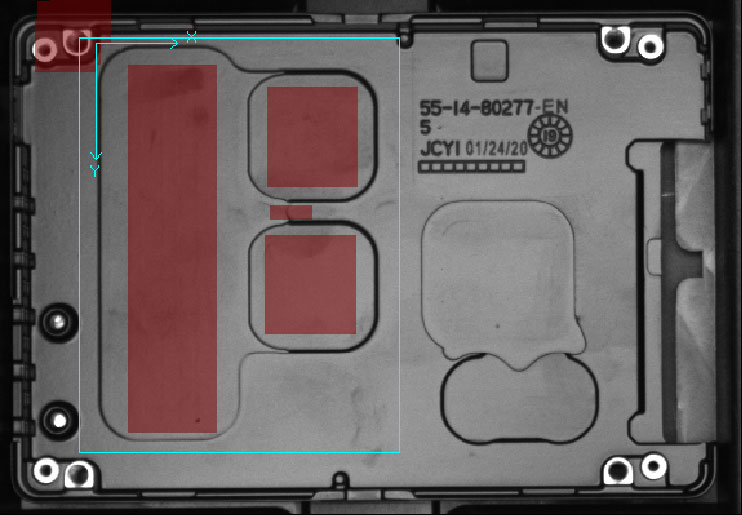
贴片 外壳特征定位 1、经过标定后,将相机的坐标系与机械手统一到一个共同的世界坐标系中; 2、对Tray盘拍照,通过模板匹配工具找出当前产品与模板的位置偏差∆X,∆Y,∆θ(左边是训练模板)
贴片特征定位 1、经过标定后,将相机的坐标系与机械手统一到一个共同的世界坐标系中; 2、对输料带拍照,通过模板匹配工具找出当前产品与模板的位置偏差∆X,∆Y,∆θ(左边是训练模板)
对位贴合 1、经过标定后,相机的坐标系已经统一到一个共同的世界坐标系中,此时可直接计算出电池与外壳对齐所需变换的姿态∆X,∆Y,∆θ 2、将∆X,∆Y,∆θ变换转换为平台坐标系下的变换,然后以∆X’,∆Y’,∆θ’参数的形式输出给外部控制器
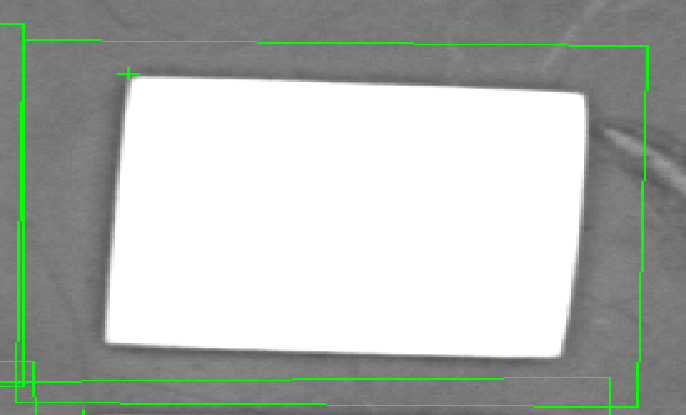
验证效果: 外壳特征定位 对采集到的图像使用模板匹配工具进行定位,并创建定位后的坐标空间Fixture;
拟合过圆心直线 在Fixture空间拟合圆心,再通过圆心坐标创建过圆心的线段
计算贴片边缘到拟合直线的距离 使用找线工具计算出贴片边缘,再使用点到直线距离求出贴片到拟合直线的距离
相同技术案例
|