|
视觉测量:3D线激光三角测量三维机器视觉系统通常由多个相机或一个或多个激光位移传感器构成。
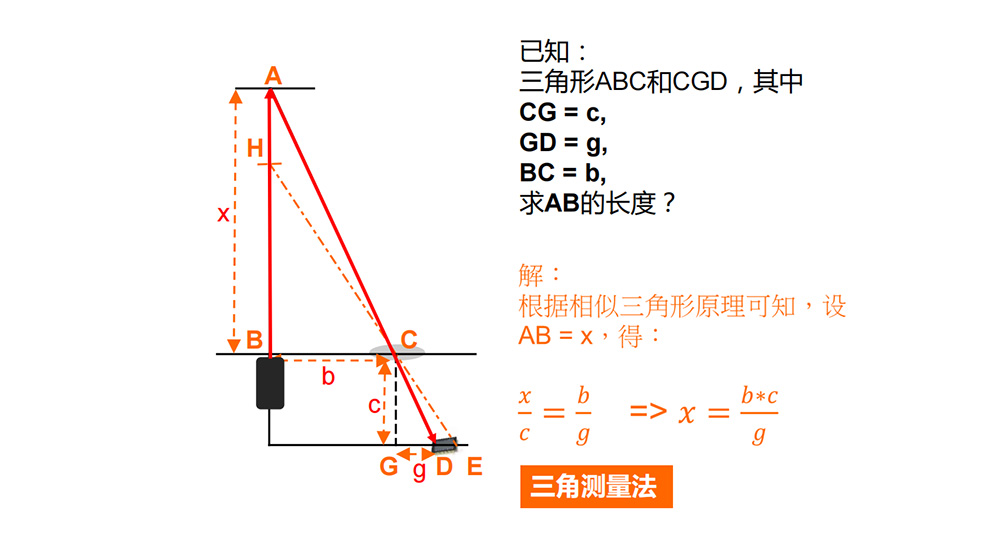
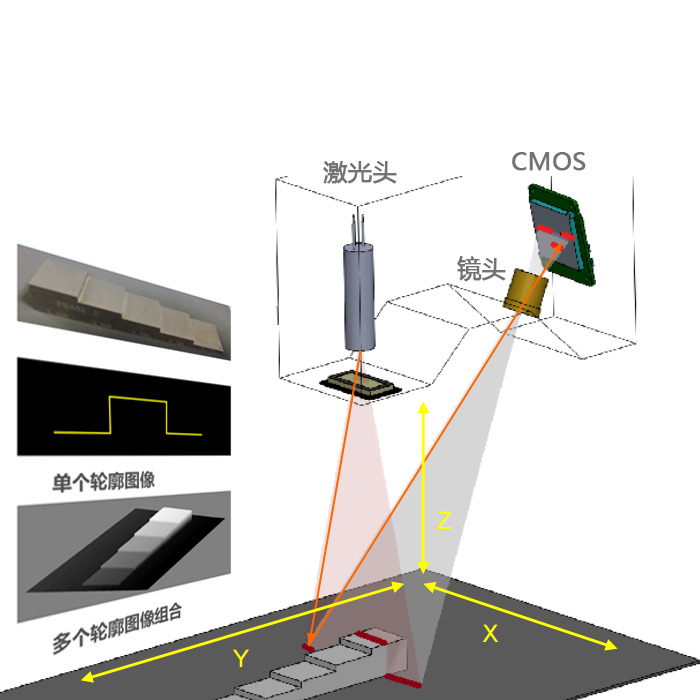
3D相机成像原理
3D相机成像原理 机器人引导应用中的多相机三维视觉为机器人提供零件朝向信息。这些系统可在不同的位置安装多个相机并且对三维空间内的对象定位进行“三角测量”。 三维激光位移传感器应用通常包含表面检测和体积测量,以至少一个相机提供三维结果。利用物体上反射的激光位置位移生成一个高度图。与线扫描类似,必须移动物体或相机才能生成整个产品图像。借助校准的偏置激光,位移传感器可以测量精度高达 20 μm 的表面高度和平面度等参数。 采用市面上速度快、分辨率高的激光束 3D 位移传感器,用于以三维形式采集图像和检测产品。 此款传感器可提供以下功能:
采集高分辨率三维图像的速度比市面上的其他位移传感器快 5 倍,以大分辨率实现高达 18 kHz(完全视野)扫描速率,在缩短循环时间的同时增大吞吐量。 将 2000 个轮廓点集中到 31-mm 的视野 (FOV) 中。遍布视野中的轮廓点数量越多,越能详细揭示该部分的细节并提高三维图像的精度,使三维检测更加准确。 采用快速HDR技术采集图像,减少了图像中的噪点,并提高了准确度。 HDR 会防止受到某一部分明亮或高度反光特征的影响,为机器视觉检测提供最佳图像。 这些功能使该传感器适合测量和检测电子元件之类的较小的部件,这些部件可能具有高反光和不反光特征。 应用领域 1、3D尺寸测量
通过3D激光、控制器、相机等设备与2D、3D工具软件组成在3D检测系统,典型应用在产品尺寸测量 2、3D校准
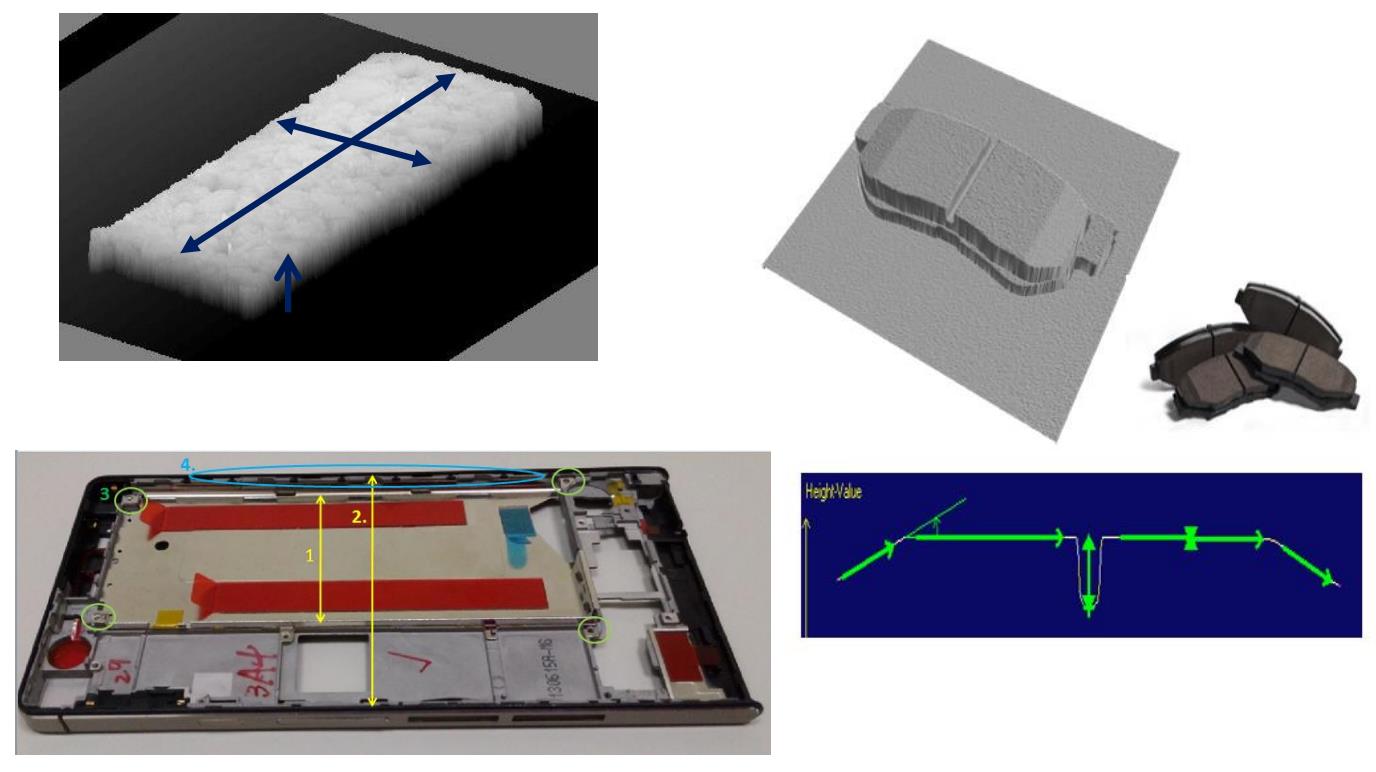
3D 校准基于图像的培训工具,用于查找三维空间中的一个或多个部分相对于相似参考部分的方向。3D 校准适合机器人拣选应用的物体定位,无论物体固定效果如何,均可让其他工具进行准确测量。在左图中,3D 校准工具确认了组件的正确位置。 3、高度计算
高度计算器工具将根据参考平面提供物体的真实高度。本例中,工具将相对于外壳来测量 SIM 托盘的高度。 4、体积计算
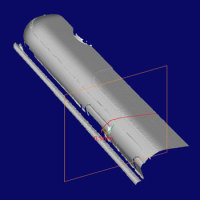
体积计算器工具会收集 3D 图像的体积数据,提供平放在特定表面上的物体的精确体积。对于左侧的图像,工具会测量涂在天窗上的粘合剂的体积。 5、截面检测
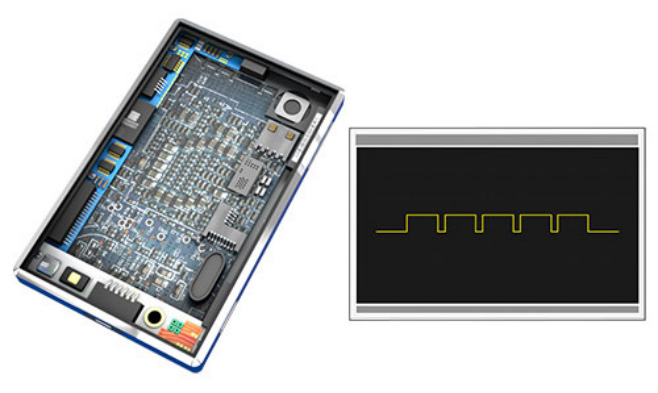
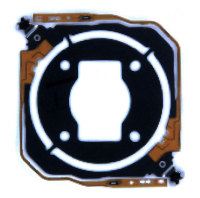
截面工具会提取一层图像,然后测量该区域的轮廓,以进行维度检测。本例中,工具将提供组件高度和位置的截面验证。 FPC软板检测案例: 高速3D线扫相机,输出的数据是高度信息以mm为单位; 具有校准功能;能够输出3D轮廓,更能组合成2D影象; 利用强大的图像处理工具,可同时完成各种2D与3D的检测需求。
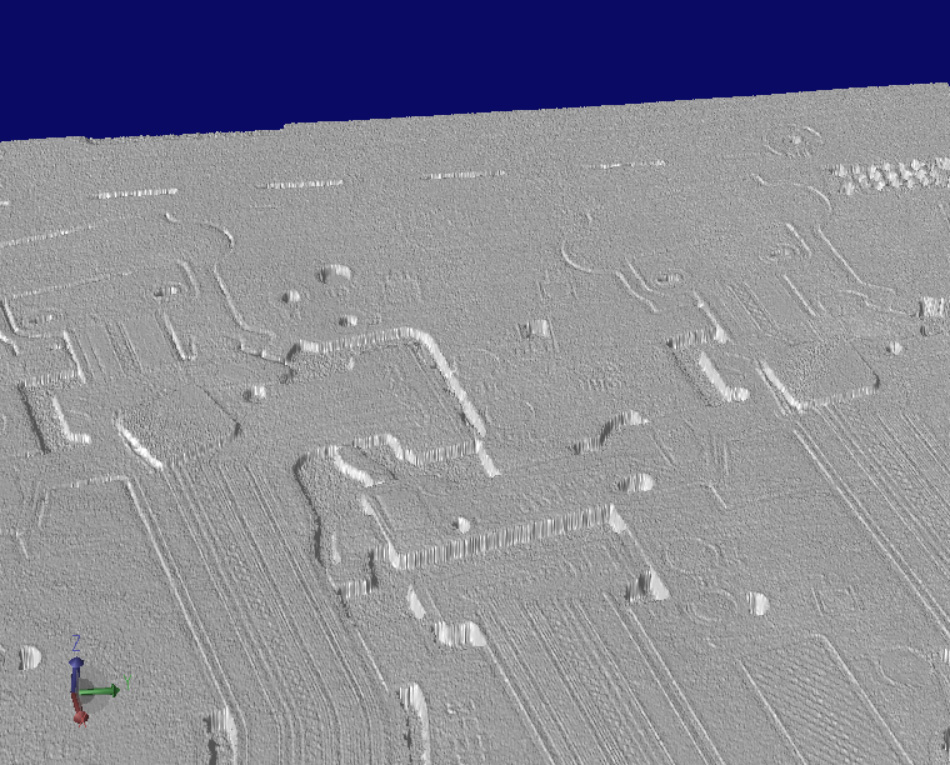
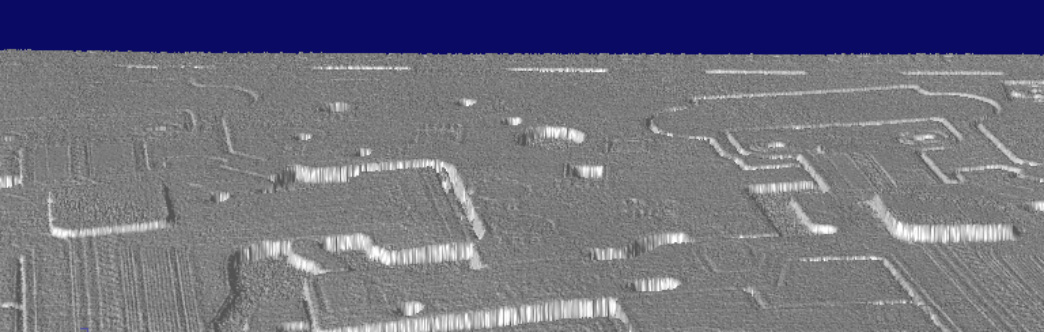
使用DS1050,结合运动机构,通过扫描后所成3D图像
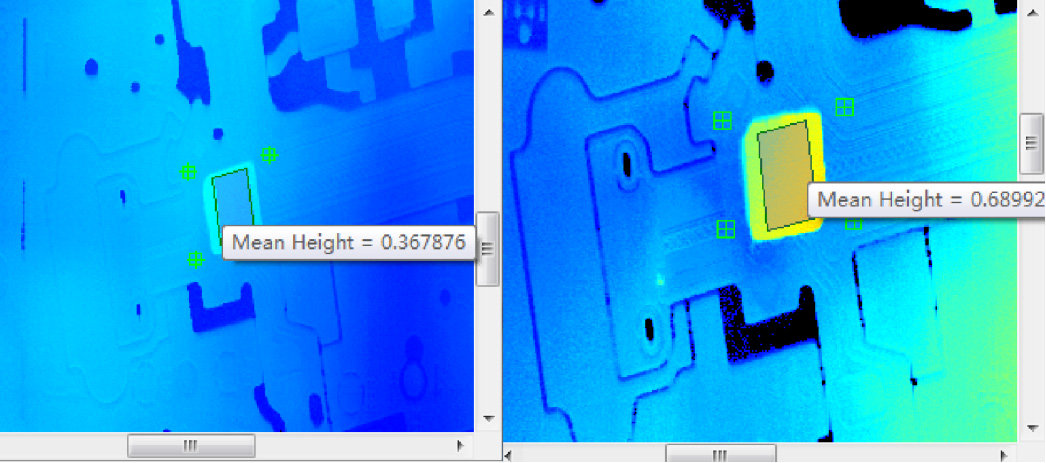
左边的补强板为1层,右边的补强板为2层;对3D图进行去躁分割等处理后,在补强板所在区域测量其相对于软板的高度,即可判断当前位置是否有贴补强板,一共贴了几层;
对深度图使用模板匹配,也可以定位出补强板的位置与角度,通过其位置可检测出是否贴偏,其角度可检测出是否贴歪斜和贴反。
补强板可通过DS1050扫描3D图像,使用2D+3D算法,可同时检测重贴、漏贴、贴偏、贴反、补强用错等缺陷。 应用案例:
上一篇视觉测量:3D光谱共聚焦下一篇视觉测量:平面测量 |